All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(8 produk tersedia)











 Siap Kirim
Siap Kirim


















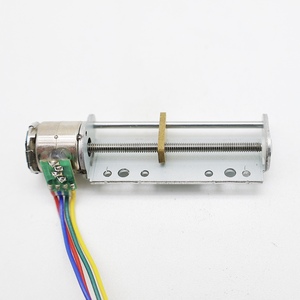
Stepper motor arduino tutorial merupakan komponen esensial dalam ranah transmisi daya, khususnya dalam aplikasi yang memerlukan kontrol gerak yang presisi. Motor ini dirancang untuk bergerak dalam langkah-langkah diskrit, memungkinkan penentuan posisi yang akurat dan berulang, yang penting dalam bidang seperti robotika, cetak 3D, dan mesin CNC. Berbeda dengan motor tradisional, stepper motor arduino tutorial tidak memerlukan sistem umpan balik untuk menentukan posisinya, menjadikannya lebih sederhana dan hemat biaya untuk banyak aplikasi. Kemampuan untuk dikontrol melalui pulsa digital membuat motor ini sangat kompatibel dengan sistem elektronik modern, menjembatani kesenjangan antara gerakan mekanis dan kontrol digital dengan mulus.
Ada beberapa jenis stepper motor arduino tutorial, masing-masing cocok untuk aplikasi dan persyaratan kinerja yang berbeda. Jenis yang paling umum meliputi motor stepper magnet permanen, motor stepper variabel, dan motor stepper hibrida. Motor stepper magnet permanen menggunakan rotor magnet permanen dan dikenal karena kesederhanaan serta efisiensi biayanya, menjadikannya ideal untuk aplikasi torsi rendah. Motor stepper variabel, di sisi lain, tidak menggunakan magnet; sebaliknya, mereka mengandalkan prinsip magnet variabel, yang memungkinkan kecepatan melangkah cepat. Motor stepper hibrida menggabungkan fitur motor stepper magnet permanen dan variabel, memberikan kinerja lebih tinggi, torsi lebih besar, dan resolusi langkah yang lebih halus. Pilihan stepper motor arduino tutorial sangat bergantung pada persyaratan spesifik aplikasi, seperti kebutuhan torsi, kecepatan, dan presisi.
stepper motor arduino tutorial menawarkan berbagai fungsi dan fitur yang menjadikannya tak tergantikan dalam aplikasi presisi. Salah satu fungsi utamanya adalah mengubah pulsa digital menjadi gerakan mekanis yang tepat, memungkinkan kontrol akurat atas posisi, kecepatan, dan akselerasi. Fitur utama stepper motor arduino tutorial termasuk torsi tinggi pada kecepatan rendah, stabilitas kecepatan rendah yang sangat baik, dan kemampuan untuk memegang posisi tanpa memerlukan daya. Ini membuatnya sangat berguna dalam aplikasi di mana posisi yang tepat sangat kritis, seperti dalam mesin cetak 3D dan mesin CNC. Selain itu, stepper motor arduino tutorial dikenal karena daya tahan dan keandalannya, seringkali memerlukan lebih sedikit perawatan daripada jenis motor lain karena konstruksinya yang sederhana dan tidak ada sikat.
Konstruksi stepper motor arduino tutorial melibatkan penggunaan berbagai bahan untuk mengoptimalkan kinerja dan daya tahan. Rotor biasanya terbuat dari bahan feromagnetik berkualitas tinggi, yang meningkatkan kinerja magnetik dan efisiensi. Stator, yang menampung gulungan, sering kali dibangun dari baja dilaminasi untuk meminimalkan kerugian arus pusar. Gulungan tembaga banyak digunakan dalam stepper motor arduino tutorial karena konduktivitas listriknya yang sangat baik, yang memastikan konversi energi listrik menjadi gerakan mekanis yang efisien. Bahan yang digunakan dalam stepper motor arduino tutorial dipilih untuk memberikan keseimbangan antara kinerja, daya tahan, dan biaya, memastikan operasi yang andal dalam lingkungan yang menuntut. Kemajuan dalam ilmu material terus mendorong peningkatan efisiensi dan kinerja motor.
Untuk menggunakan stepper motor arduino tutorial dengan efektif, penting untuk memahami prinsip operasi dan keterbatasannya. Pemilihan jenis motor yang tepat berdasarkan kebutuhan torsi, kecepatan, dan presisi aplikasi sangat penting. Untuk kinerja optimal, stepper motor arduino tutorial harus dikendalikan dengan pengendali yang tepat yang sesuai dengan spesifikasi motor, memastikan operasi yang lancar dan akurat. Juga penting untuk mempertimbangkan tegangan dan arus pasokan daya untuk mencegah overheating dan memastikan operasi yang efisien. Dalam aplikasi yang memerlukan presisi tinggi, teknik mikrostepping dapat digunakan untuk meningkatkan resolusi dan kelancaran gerakan. Pemeliharaan rutin, seperti memeriksa koneksi dan memastikan pendinginan yang memadai, dapat membantu memperpanjang umur stepper motor arduino tutorial dan mempertahankan kinerjanya dari waktu ke waktu.
Saat memilih stepper motor arduino tutorial untuk aplikasi Anda, beberapa faktor harus dipertimbangkan untuk memastikan kinerja optimal. Pertimbangan pertama adalah kebutuhan torsi, yang menentukan kemampuan motor untuk menggerakkan atau menahan beban. Aplikasi yang membutuhkan torsi tinggi mungkin mendapatkan manfaat dari motor stepper hibrida, sedangkan aplikasi yang membutuhkan torsi lebih rendah dapat memilih jenis magnet permanen. Selain itu, lingkungan operasi memainkan peran penting; misalnya, motor yang digunakan dalam kondisi keras harus memiliki konstruksi dan bahan yang kuat yang tahan terhadap keausan. Penting juga untuk mempertimbangkan resolusi langkah yang diinginkan, karena langkah yang lebih halus memberikan presisi kontrol yang lebih besar.
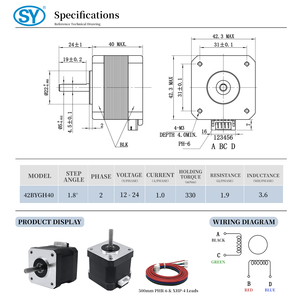
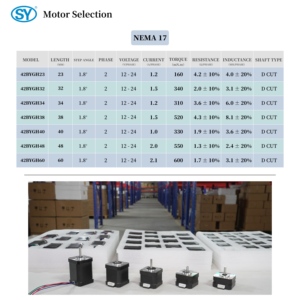
Memahami spesifikasi stepper motor arduino tutorial sangat penting untuk membuat pilihan yang tepat. Spesifikasi utama termasuk sudut langkah, yang mempengaruhi resolusi dan kelancaran gerakan. Sudut langkah yang lebih kecil memungkinkan kontrol yang lebih presisi, bermanfaat dalam aplikasi seperti mesin CNC. Peringkat tegangan dan arus juga penting, karena mereka menentukan konsumsi daya dan efisiensi motor. Selanjutnya, torsi menahan menunjukkan kemampuan motor untuk mempertahankan posisinya ketika tidak bergerak, yang sangat penting dalam aplikasi yang membutuhkan stabilitas dan presisi. Mengevaluasi spesifikasi ini membantu mencocokkan motor dengan kebutuhan khusus aplikasi.
stepper motor arduino tutorial digunakan secara luas di berbagai industri karena kemampuan kontrol presisi mereka. Di bidang medis, mereka digunakan dalam peralatan seperti pompa infus dan perangkat pencitraan, di mana posisi yang akurat sangat penting. Industri otomotif menggunakan motor ini dalam sistem yang membutuhkan gerakan yang dapat diandalkan dan berulang, seperti dalam kontrol pelatuk elektronik. Di sektor elektronik konsumen, mereka esensial dalam perangkat seperti printer dan kamera, menyediakan gerakan yang tepat untuk output berkualitas tinggi. Setiap aplikasi memerlukan pertimbangan hati-hati terhadap spesifikasi motor untuk memastikan memenuhi kriteria kinerja yang diperlukan.
Perbedaan utama antara stepper motor arduino tutorial dan motor servo terletak pada mekanisme kontrolnya. Motor stepper beroperasi dalam langkah-langkah diskrit dan tidak memerlukan sistem umpan balik untuk kontrol posisi, menjadikannya lebih sederhana dan sering kali lebih hemat biaya. Motor servo, di sisi lain, mengandalkan sistem umpan balik untuk mencapai posisi yang tepat, memungkinkan gerakan yang lebih halus dan kecepatan yang lebih tinggi.
Untuk meningkatkan presisi stepper motor arduino tutorial, teknik mikrostepping dapat digunakan, yang membagi setiap langkah penuh menjadi inkremen yang lebih kecil. Ini meningkatkan resolusi dan kelancaran, memperbaiki kemampuan motor untuk mencapai gerakan yang lebih halus. Selain itu, memastikan pengaturan pengendali yang optimal dan meminimalkan umpan balik mekanis dapat berkontribusi pada presisi yang meningkat.
Meskipun stepper motor arduino tutorial unggul dalam aplikasi yang membutuhkan presisi pada kecepatan rendah, mereka dapat digunakan dalam skenario kecepatan tinggi dengan memilih jenis motor dan pengendali yang sesuai. Motor stepper hibrida sering menawarkan kinerja yang lebih baik pada kecepatan yang lebih tinggi karena desain mereka. Namun, penting untuk memastikan spesifikasi motor sesuai dengan kebutuhan kecepatan untuk menghindari masalah kinerja.
Perawatan untuk stepper motor arduino tutorial biasanya melibatkan pengecekan berkala koneksi listrik dan memastikan pendinginan yang memadai untuk mencegah overheating. Tidak seperti motor sikat, motor stepper tidak memiliki sikat yang aus, mengurangi kebutuhan perawatan. Namun, inspeksi berkala terhadap komponen mekanis dan pelumasan mungkin diperlukan untuk mempertahankan kinerja optimal.
Ya, stepper motor arduino tutorial dapat digunakan dalam perangkat yang dioperasikan dengan baterai, asalkan konsumsi daya motor kompatibel dengan kapasitas baterai perangkat. Memilih motor dengan tegangan dan kebutuhan arus yang lebih rendah dapat membantu mengoptimalkan masa pakai baterai. Selain itu, sirkuit pengendali yang efisien dapat lebih mengurangi konsumsi daya, membuatnya cocok untuk aplikasi portabel.